题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
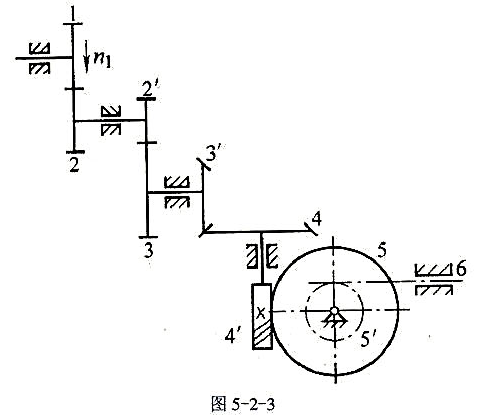
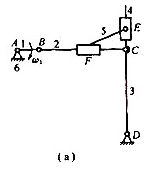
在图5-2-3所示轮系中,已知若n1=500r/min,求齿条6线速度v的大小和方向。
在图5-2-3所示轮系中,已知 若n1=500r/min,求齿条6线速度v的大小和方向。
若n1=500r/min,求齿条6线速度v的大小和方向。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码进入小程序
题目内容
(请给出正确答案)
在图5-2-3所示轮系中,已知若n1=500r/min,求齿条6线速度v的大小和方向。
答案
 更多“在图5-2-3所示轮系中,已知若n1=500r/min,求齿条6线速度v的大小和方向。”相关的问题
更多“在图5-2-3所示轮系中,已知若n1=500r/min,求齿条6线速度v的大小和方向。”相关的问题
第1题
第3题
在图6-14所示操舵装置的周转轮系中,已知齿数z1=z4.(1)自动操舵时刹住舵轮A,这时复式电动机开动,执行电动机再通过行星轮系1-2-3-4-5及一些其他机构进行操舵,求传动比i15;(2)手动操舵时用控制杆锁住复式电动机,故轮1不动,这时松开舵轮A,并用它通过行星轮系4-3-2-1-5及一些其他机构进行操舵,求传动比i45.
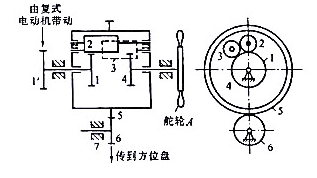
图6-14
第4题
第5题
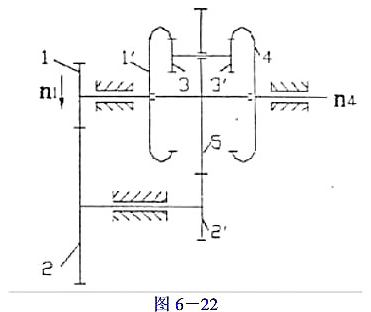
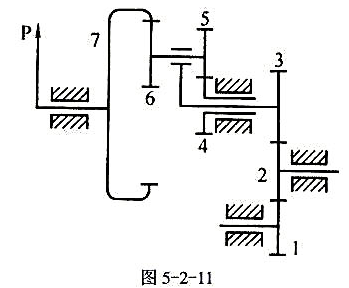
在图5-2-11所示机构中,已知z1=17,z2=20,z3=85,z4=18,z5=24,z6=21,z7=63,求:
(1)当n1=1001r/min、n4=10000r/min时,np=?
(2)当n1=n4时,np=?
(3)当n1=1001r/min、n4=10001r/min时,np=?
第6题
第7题
=30°, 1=100rad/s,试求角速度 5、速度vE4、角速度a5、角加速度aE4.
1=100rad/s,试求角速度 5、速度vE4、角速度a5、角加速度aE4.
第8题
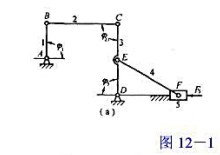
在图12-1(a)所示的搬运器机构中,已知滑块质量m=20kg,lAB=lED=100mm,lBC=lCD=lEF=200mm, φ1=φ23=φ3=90°.求由作用在滑块5上的阻力F5=1kN而换算到构件1的轴A上的等效阻力矩MT及换算到轴A的滑块质量的等效转动惯量J.
第9题
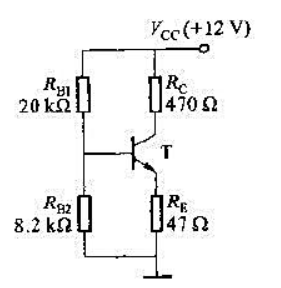
2)若RE=0,RB2开路,指出电路工作模式.
第10题
题9-13图(a)所示机构,已知杆AB的质量为m1,均质圆轮的质量为m2,半径为R,以匀角速度w绕O轴转动,顶杆与轮之间的摩擦因数为f。试求此时O处的约束力。

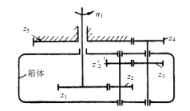
 试求箱体的转速。
试求箱体的转速。